हवाई नेविगेशन। हवाई नेविगेशन के लिए सामान्य नियम रूसी संघ के सशस्त्र बलों के हवाई नेविगेशन के लिए दिशानिर्देश
किसी दिए गए स्पेस-टाइम प्रक्षेपवक्र के साथ।
हवाई नेविगेशन कार्य
- निर्देशांक (भौगोलिक -> अक्षांश, देशांतर; ध्रुवीय -> दिगंश, सीमा)
- ऊंचाई (पूर्ण, सापेक्ष, सत्य)
- पृथ्वी की सतह से ऊँचाई (सच्ची उड़ान ऊँचाई)
- कुंआ
- ट्रैक कोण (सशर्त, सत्य, चुंबकीय, ऑर्थोड्रोमिक)
- साधन, सच, जमीनी गति
- गति, दिशा (मौसम विज्ञान, नौवहन) और पवन कोण
- किसी दिए गए पथ की रेखा (LZP)
- रैखिक पार्श्व विचलन (एलबीयू)
- अतिरिक्त सुधार (डीपी) (रेडियो स्टेशन के लिए उड़ान भरते समय)
- पार्श्व चोरी (बीयू) (रेडियो स्टेशन से उड़ान भरते समय)
- रिवर्स, डायरेक्ट बेयरिंग (ओपी, पीपी) (रेडियो दिशा खोजक से / के लिए उड़ान भरते समय)
- पथ का नियंत्रण और सुधार: (एलजेडपी से बाहर निकलने के साथ या पीपीएम (मार्ग का मोड़) में एलबीयू और एसएचवीटी पर निर्भर करता है)
- सीमा के अनुसार
- की ओर
- प्लॉटिंग और डेड रेकिंग:
- सीधा
- वापस
- शांत
- अपने गंतव्य तक पहुंचने के लिए इष्टतम मार्गों का निर्माण
- कम से कम संभव समय में बिंदु से बाहर निकलें
- बिंदु c . से बाहर निकलें न्यूनतम लागतईंधन
- एक निश्चित समय पर बिंदु से बाहर निकलें
- उड़ान के दौरान शीघ्र मार्ग सुधार
- विमान में खराबी के मामले में उड़ान कार्य को बदलते समय
- मार्ग पर प्रतिकूल मौसम संबंधी घटनाओं के मामले में
- दूसरे विमान से टकराने से बचने के लिए
- दूसरे विमान से मुलाकात के लिए
विमान के नेविगेशन तत्वों का निर्धारण
नेविगेशन तत्वों को निर्धारित करने के लिए विभिन्न तकनीकी साधनों का उपयोग किया जाता है:
- भू-तकनीकी- आपको पूर्ण और सापेक्ष उड़ान ऊंचाई, विमान के पाठ्यक्रम, उसके स्थान, और इसी तरह निर्धारित करने की अनुमति देता है)।
- हवा और जमीन की गति मीटर,
- चुंबकीय और जाइरोमैग्नेटिक कम्पास, जाइरो-कम्पास,
- ऑप्टिकल दृष्टि उपकरण,
- जड़त्वीय नेविगेशन सिस्टम और इतने पर।
- रेडियो इंजीनियरिंग- रेडियो संकेतों का उपयोग करके विद्युत चुम्बकीय क्षेत्र के विभिन्न मापदंडों को मापकर विमान की वास्तविक ऊंचाई, जमीन की गति, स्थान का निर्धारण करने की अनुमति दें।
- रेडियो नेविगेशन सिस्टम और इतने पर।
- खगोलीय- आपको विमान के पाठ्यक्रम और स्थान का निर्धारण करने की अनुमति देता है
- खगोलीय परकार
- एस्ट्रो ओरिएंटेटर वगैरह
- प्रकाश इंजीनियरिंग- कठिन मौसम संबंधी परिस्थितियों में और रात में विमान की लैंडिंग प्रदान करना और अभिविन्यास की सुविधा प्रदान करना।
- प्रकाश बीकन।
- एकीकृत नेविगेशन सिस्टम- ऑटोपायलट - दृश्यता के अभाव में पूरे मार्ग और लैंडिंग दृष्टिकोण के साथ स्वचालित उड़ान प्रदान कर सकता है पृथ्वी की सतह.
के स्रोत
- चेर्नी एमए, कोरबलिन वी.आई. टूटी हुई कड़ी
विकिमीडिया फाउंडेशन। 2010.
- अंतरिक्ष नेविगेशन
- जड़त्वीय नेविगेशन
देखें कि "एयर नेविगेशन" अन्य शब्दकोशों में क्या है:
हवाई नेविगेशन- किसी दिए गए प्रक्षेपवक्र के साथ विमान और विमान के समूहों की उच्चतम सटीकता, विश्वसनीयता और सुरक्षा प्राप्त करने के उद्देश्य से चालक दल के कार्यों का एक सेट, साथ ही उन्हें स्थान और समय में निर्दिष्ट वस्तुओं (लक्ष्यों) पर लाने के लिए ... आधिकारिक शब्दावली
हवाई नेविगेशन- एयर नेविगेशन, एयर नेविगेशन एक प्रोग्राम किए गए प्रक्षेपवक्र के साथ एक विमान चलाने के तरीकों और साधनों का विज्ञान है। वायु नेविगेशन कार्य विमान के नेविगेशन तत्वों का निर्धारण अक्षांश, देशांतर ऊंचाई सतह से NUM ऊंचाई ... ... विकिपीडिया
पथ प्रदर्शन- (अक्षांश। नाविक से मैं एक जहाज पर नौकायन कर रहा हूं), 1) जहाजों, विमानों (वायु नेविगेशन, हवाई नेविगेशन) और अंतरिक्ष यान (अंतरिक्ष नेविगेशन) को चलाने के मार्ग और तरीकों को चुनने के तरीकों का विज्ञान। नेविगेशन कार्य: ढूँढना ... ... बड़ा विश्वकोश शब्दकोश
पथ प्रदर्शन- तथा; एफ। [अव्य। नेविगो से नेविगो मैं नौकायन कर रहा हूं] 1. शिपिंग, नेविगेशन। नदी के उथले होने के कारण एन. असंभव। 2. साल का ऐसा समय जब स्थानीय वातावरण की परिस्थितियाँशिपिंग संभव है। नेविगेशन खोलना। बंदरगाह में जहाज शुरू होने की प्रतीक्षा कर रहे थे ... ... विश्वकोश शब्दकोश
मार्गदर्शन- विक्षनरी में एक लेख "नेविगेशन" है। नेविगेशन (अक्षांश। नेविगेटियो, अक्षांश से। नेविगो मैं एक जहाज पर नौकायन कर रहा हूं): नेविगेशन, नेविगेशन एक वर्ष में समय की अवधि, जब स्थानीय जलवायु परिस्थितियों के अनुसार, यह संभव है से ... विकिपीडिया
पथ प्रदर्शन विश्वकोश "विमानन"
पथ प्रदर्शन- चावल। 1. स्थिति की तर्ज पर विमान के स्थान का निर्धारण। विमान नेविगेशन, हवाई नेविगेशन (ग्रीक aēr से - वायु और लैटिन नेविगेशन - नेविगेशन), - से विमान उड़ाने के तरीकों और साधनों का विज्ञान ... ... विश्वकोश "विमानन"
पथ प्रदर्शन- (अक्षांश। नेविगेशन, नौसेना के जहाज से) 1) नेविगेशन। 2) जहाज नियंत्रण का विज्ञान। रूसी भाषा में शामिल विदेशी शब्दों का शब्दकोश। चुडिनोव एएन, 1910। नेविगेशन 1) खुले में जहाज नियंत्रण की कला। समुद्र; 2) सीजन, पर ... ... रूसी भाषा के विदेशी शब्दों का शब्दकोश
नेविगेशन (समुद्री)- नेविगेशन (लैट। नेविगेटियो, नेविगो से - मैं एक जहाज पर पाल करता हूं), 1) नेविगेशन, शिपिंग। 2) एक वर्ष में समय की अवधि जब स्थानीय जलवायु परिस्थितियों के कारण नेविगेशन संभव है। 3) नेविगेशन का मुख्य खंड, जिसमें सैद्धांतिक ... महान सोवियत विश्वकोश
पथ प्रदर्शन- नेविगेशन, और, पत्नियां। 1. जहाजों और विमानों को चलाने का विज्ञान। नेविगेशन का स्कूल। वायु एन. इंटरप्लेनेटरी (स्पेस) एन। 2. वह समय जिसके दौरान शिपिंग संभव है, साथ ही शिपिंग भी। प्रारंभ, नेविगेशन का अंत। एन. खुला है। | ... ... व्याख्यात्मक शब्दकोशओझेगोवा
विषय № 1 हवाई नेविगेशन की मूल बातें।
1
विषय
परिचय
1. नेविगेशन की परिभाषा। नेविगेशन कार्य।
2. नेविगेशन के तकनीकी साधनों का वर्गीकरण।
3. पृथ्वी का आकार और आकार। प्रमुख भौगोलिक
ग्लोब पर बिंदु, रेखाएँ और वृत्त।
4. दूरियों के मापन की इकाइयाँ।
5. पृथ्वी की सतह पर दिशाएँ।
6. पथ और स्थिति की मुख्य रेखाएँ।
7. भौगोलिक निर्देशांक।
8. हवा में प्रयुक्त समन्वय प्रणाली
पथ प्रदर्शन।
निष्कर्ष।
हवाई नेविगेशन मूल बातें।
3
हवाई नेविगेशन सुरक्षित, सटीक और विश्वसनीय का विज्ञान है
पृथ्वी की सतह पर एक बिंदु से विमान को चलाने के लिए
एक और।
वायु नेविगेशन - विमान प्रक्षेपवक्र नियंत्रण,
उड़ान में चालक दल द्वारा किया गया।
एयर नेविगेशन को क्रियाओं के एक सेट के रूप में भी समझा जाता है
विमान चालक दल और जमीनी नियंत्रण कर्मी
सुरक्षा सुनिश्चित करने के उद्देश्य से हवाई यातायात,
स्थापित मार्गों पर उड़ानों की उच्चतम सटीकता
(मार्ग) और नियत समय पर गंतव्य पर पहुंचना।
प्रक्षेपवक्र और ट्रैक
प्रक्षेपवक्र और ट्रैक
हवाई जहाज का स्थानिक स्थान (PMS) - बिंदु B
अंतरिक्ष जिसमें इस पलसमय
विमान के द्रव्यमान का केंद्र है।
प्लेन सीट (MS) - जमीन पर PMS का प्रक्षेपण
सतह
प्रक्षेपवक्र - पीएमएस द्वारा वर्णित रेखा के रूप में यह चलता है।
ट्रैक लाइन - एमसी द्वारा वर्णित रेखा के रूप में यह चलती है
(पृथ्वी की सतह पर प्रक्षेपवक्र का प्रक्षेपण)।
दिए गए पथ की रेखा (LZP) वह रेखा है जिसके साथ
उड़ान योजना के अनुसार एमएस को स्थानांतरित करना चाहिए
वास्तविक पथ की रेखा (LFP) - जिसके साथ यह है
वास्तव में किसी दी गई उड़ान में चलता है।
4
हवाई नेविगेशन के लिए बुनियादी आवश्यकताएं।
हवाई नेविगेशन सुरक्षा एक बुनियादी आवश्यकता है।
शुद्धता। एयर नेविगेशन सटीकता डिग्री है
निर्दिष्ट एक के लिए वास्तविक प्रक्षेपवक्र का सन्निकटन। से
सटीकता सुरक्षा और दक्षता दोनों पर निर्भर करती है
उड़ान।
लाभप्रदता। उड़ान का समय जितना कम होगा, उतना ही कम
लागत मूल्य, जिसमें सभी संबद्ध शामिल हैं
लागत - से वेतनकर्मियों की लागत
ईंधन की खपत।
नियमितता। सामान्य तौर पर उड़ानें
निर्धारित समय पर चलाएं। प्रस्थान में देरी या
आने जाने से यात्रियों को न केवल असुविधा होती है,
लेकिन इस तथ्य को जन्म दे सकता है कि विमान को ज़ोन में भेजा जाएगा
प्रतीक्षा कर रहा है जहां यह रिलीज के लिए इंतजार करेगा
दृष्टिकोण के लिए अस्थायी "खिड़की"।
5
6.
4
एयर क्रू (पायलट) के लिए बुनियादी आवश्यकताएं
जहाजों:
उड़ान सुरक्षा आश्वासन;
स्थापित मार्ग (मार्ग) के साथ उड़ान का सटीक प्रदर्शन
ऐसी उड़ान व्यवस्था को बनाए रखते हुए एक निश्चित ऊंचाई पर कि
कार्य को पूरा करना सुनिश्चित करता है;
के लिए आवश्यक नेविगेशन तत्वों को परिभाषित करना
एक स्थापित मार्ग या उड्डयन के साथ उड़ान भरना
काम करता है (फोटोग्राफी, विमानन खोज, कार्गो ड्रॉपिंग और
आदि।);
निष्पादन क्षेत्र में विमान के आगमन को सुनिश्चित करना
हवाई कार्य, किसी दिए गए स्थान पर गंतव्य के बिंदु या हवाई अड्डे तक
सुरक्षित लैंडिंग का समय और प्रदर्शन;
हवाई नेविगेशन के मुख्य कार्य।
किसी दिए गए का गठन (चयन)
प्रक्षेप पथ
में विमान की स्थिति का निर्धारण
अंतरिक्ष और उसके पैरामीटर
गति।
एक नेविगेशन समाधान का गठन
(आउटपुट के लिए नियंत्रण क्रियाएं
किसी दिए गए को विमान
प्रक्षेपवक्र।)
7
8.
5
इन समस्याओं को सफलतापूर्वक हल करने के लिए, चालक दल के साथ
पर्याप्त सटीकता के साथ पता होना चाहिए:
एक निश्चित समय पर विमान कहाँ है;
आपको किस दिशा में और किस ऊंचाई पर प्रदर्शन करना चाहिए
आगे की उड़ान;
एक ही समय में किस गति को बनाए रखा जाना चाहिए ताकि दिए गए पर
आइटम नियत समय पर आते हैं;
केवल इस डेटा के साथ चालक दल नियंत्रित करने में सक्षम है
विमान की आवाजाही।
हवाई नेविगेशन की समस्याओं को हल करने के लिए,
तकनीकी साधन।
9.
6
प्रश्न 2. नेविगेशन के तकनीकी साधनों का वर्गीकरण।
10.
7
तकनीकी साधनों का वर्गीकरण
पथ प्रदर्शन
तकनीकी साधन
पथ प्रदर्शन
स्थानीय
स्थान
सवार
लौकिक
प्रकृति
उपयोग
स्वायत्तशासी
गैर स्वायत्त
10
11. नेविगेशन के तकनीकी साधनों का वर्गीकरण
नेविगेशन सहायता
रेडियो इंजीनियरिंग
भू-तकनीकी
उपग्रह
खगोलीय
प्रकाश
11
12.
9
प्रश्न 3. पृथ्वी का आकार और आकार। मुख्य
ग्लोब पर भौगोलिक बिंदु, रेखाएँ और वृत्त।
13. पृथ्वी की सतह के मॉडल।
भौतिक सतह पृथ्वी की वास्तविक सतह है।
एक समतल सतह एक सतह है, सभी बिंदुओं पर
गुरुत्वाकर्षण की दिशा के लंबवत (साहुल रेखा)।
एक जियोइड एक समतल सतह द्वारा बनाई गई आकृति है
एक शांत में विश्व महासागर की सतह के साथ मेल खाता है
शर्त।
Quasigeoid - एक सतह जो एक जियोइड के साथ मेल खाती है
विश्व महासागर की सतह और भूमि पर इसके बहुत करीब है। इस
सतह और इसे माध्य समुद्र तल कहा जाता है। (MSL)
एक दीर्घवृत्ताभ एक गणितीय रूप से सही पिंड है जो द्वारा प्राप्त किया जाता है
अर्ध-लघु अक्ष के चारों ओर दीर्घवृत्त का घूमना।
क्षेत्र - यह एक असम्पीडित दीर्घवृत्त है (जब उच्च परिशुद्धता नहीं है
आवश्यक है, तो पृथ्वी को एक सरल आकृति द्वारा दर्शाया जा सकता है)
समतल - पृथ्वी की सतह को समतल के रूप में लिया जाता है, अर्थात्
13
पृथ्वी की वक्रता को ध्यान में नहीं रखा जाता है। (गणना के लिए किया जाता है
सीमित क्षेत्र)
14. पृथ्वी की भौतिक सतह
15.जियोइड और पृथ्वी दीर्घवृत्ताकार
11
जियोइड और पृथ्वी दीर्घवृत्ताकार
इलाके की ऊंचाई सतह से मापी जाती है
अर्धवृत्ताकार। लेकिन व्यवहार में यह माना जा सकता है कि
जियोइड की सतह, थोड़ा अंतर दिया। पर
मैदान 20 - 30 सेमी, पहाड़ों में 2 - 3 मीटर है।
1
16. पृथ्वी की सतह के मॉडल।
10
जिओएड
आकृति,
सीमित
स्तर
सतह,
एक राज्य में विश्व महासागर की सतह के साथ मेल खाता है
पानी का संतुलन। हर बिंदु पर समतल सतह
गुरुत्वाकर्षण की दिशा के लिए सामान्य।
एक quasigeoid एक सतह है जो एक सतह के साथ मेल खाता है
जिओएड
ऊपर
सागरों
तथा
महासागर के
तथा
लगभग
मुनासिब
ऊपर
भूमि से। (चूंकि
नहीं
ज्ञात
पृथ्वी के अंदर द्रव्यमान का वितरण)
एक पृथ्वी दीर्घवृत्ताभ एक आकृति है जो दर्शाता है
क्रांति का एक चपटा दीर्घवृत्त है। इसके आयाम चुने गए हैं
इस तरह से कि यह कुछ क्षेत्रों के भीतर है
जितना संभव हो सके जियोइड सतह से संपर्क किया।
इस तरह के एक दीर्घवृत्त को संदर्भ दीर्घवृत्त कहा जाता है।
17. पृथ्वी की सतह के मॉडल
जियोइड और संदर्भ दीर्घवृत्ताभ सतह
12
18. संदर्भ - क्रासोव्स्की दीर्घवृत्त
संदर्भ दीर्घवृत्तीय विशेषताएं
क्रासोव्स्की (एसके -42):
अर्ध-प्रमुख अक्ष (भूमध्य रेखा की त्रिज्या) a = ६ ३७८ २४५ मीटर;
अर्ध-लघु अक्ष (भूमध्यरेखीय तल से तक की दूरी)
डंडे) बी = 6 356 863 मीटर;
संपीड़न अनुपात सी = 0.00335233
11
19.
12
संदर्भ - क्रासोव्स्की दीर्घवृत्त
20.
13
संदर्भ - दीर्घवृत्त पीजेड - 90 02
संदर्भ दीर्घवृत्तीय विशेषताएं
पीजेड-90 02
अर्ध-प्रमुख अक्ष (भूमध्य रेखा की त्रिज्या) a = 6 378 136 m;
दीर्घवृत्ताकार c = 0.0033528 का संपीड़न अनुपात;
दीर्घवृत्त का केंद्र
सिस्टम संयोजित करें।
संयुक्त
साथ
शुरुआत
पृथ्वी को केन्द्र मानकर विचार किया हुआ
21. WGS-84 . के लक्षण
14
निर्दिष्टीकरण WGS-84
WGS-84 गोलाकार के लक्षण:
भूमध्यरेखीय त्रिज्या a = 6 378 137 m;
ध्रुवीय त्रिज्या बी = 6 356 752.314245 मीटर;
अधिकतम गोलाकार विचलन
जियोइड 200 मीटर से अधिक नहीं है।
WGS-84
आईसीएओ ने 1 जनवरी 1998 को प्रकाशित करने का निर्णय लिया है
वैमानिकी सूचना दस्तावेज निर्देशांक
पूरी दुनिया के लिए एक ही समन्वय प्रणाली में अंक,
WGS-84 (वर्ल्ड जियोडेटिक सिस्टम) कहा जाता है।
.
साथ
22. डब्ल्यूजीएस - 84
15
WGS-84
तीन आयामी
प्रणाली
COORDINATES
के लिये
पृथ्वी पर स्थिति। स्थानीय प्रणालियों के विपरीत,
एक
संयुक्त
प्रणाली
के लिये
पूरा
ग्रह।
WGS-84 के पूर्ववर्ती WG-72, WGS-64 और . थे
डब्ल्यूजीएस-60।
WGS-84 केंद्र के सापेक्ष निर्देशांक को परिभाषित करता है
पृथ्वी का द्रव्यमान, त्रुटि 2 सेमी से कम है। WGS-84 में,
शून्य मध्याह्न रेखा IERS संदर्भ मध्याह्न रेखा है।
यह 5.31 "ग्रीनविच के पूर्व में स्थित है"
मध्याह्न
23. प्रमुख भौगोलिक बिंदु, रेखाएं और वृत्त।
मुख्य भौगोलिक बिंदु, रेखाएं
और ग्लोब पर मंडलियां
16
24. पृथ्वी की सतह पर दिशाओं और दूरियों को मापना।
17
एक सतह पर दिशाओं और दूरियों को मापना
धरती।
कई नेविगेशन कार्यों को हल करते समय जिनकी आवश्यकता नहीं होती है
उच्च परिशुद्धता, पृथ्वी को एक गेंद के रूप में लिया जाता है जिसकी त्रिज्या R = 6371 . है
किमी. इस सहिष्णुता के साथ, लंबाई निर्धारित करने में अधिकतम त्रुटियां
दिशा निर्धारित करने में 0.5% और 12 "हो सकता है।
पृथ्वी की त्रिज्या जानकर आप बड़े वृत्त की लंबाई की गणना कर सकते हैं
(मेरिडियन और भूमध्य रेखा);
एल = 2pR = 2 x 3.14 x 6371 = 40030 40,000 किमी।
बड़े वृत्त की लंबाई निर्धारित करके, आप चाप की लंबाई ज्ञात कर सकते हैं
मेरिडियन (भूमध्य रेखा) 1 ° या 1 में ":
मेरिडियन (भूमध्य रेखा) का 1 ° चाप = L / 360 ° = 111.2 किमी,
1 "मेरिडियन (भूमध्य रेखा) का चाप 111/60" = 1.853 किमी।
सेकंड - लगभग 31 मी।
प्रत्येक समानांतर की लंबाई भूमध्य रेखा की लंबाई से कम होती है और यह निर्भर करती है
स्थान का अक्षांश .
यह L जोड़े = L eq cosφ जोड़े के बराबर है।
25. दूरी की इकाइयों का रूपांतरण।
दूरी इकाई अनुपात:
1 एमएम (एनएम) = 1! याम्योत्तर के चाप = १८५२ मीटर = १.८५२ किमी;
1 पूर्वाह्न (एसएम) = 1.6 किमी;
1 फुट (फीट) = 30.48 सेमी;
1 मीटर = 3.28 फीट।
एक दूरी की इकाई को दूसरी में बदलना
सूत्रों के अनुसार बनाया गया है:
एस किमी = एस एमएम x 1.852;
एस एमएम = एस किमी / 1.852;
एस किमी = एस एएम x 1.6;
एस एएम = एस किमी / 1.6;
एच फीट = एनएम x 3.28;
एच एम = एच फीट / 3.28।
19
26. पृथ्वी की सतह पर समन्वय प्रणाली।
गोलाकार समन्वय प्रणाली
जियोडेटिक समन्वय प्रणाली
26
27. आयताकार समन्वय प्रणाली।
आयताकार समन्वय प्रणाली सामान्य कार्टेशियन हैं
तीन लंबवत अक्ष (एक्स, वाई, जेड) वाले सिस्टम। वे
अंतरिक्ष में बिंदुओं की स्थिति का वर्णन करने के लिए उपयोग किया जाता है,
सतह पर या पृथ्वी के अंदर।
आयताकार समन्वय प्रणाली:
पृथ्वी को केन्द्र मानकर विचार किया हुआ
टोपोसेंट्रिक
संदर्भ
रेफरेंशियल रेक्टेंगुलर सिस्टम्स - कोऑर्डिनेट सेंटर
दीर्घवृत्त के केंद्र में है
27
28. आयताकार समन्वय प्रणाली
29. जियोडेटिक निर्देशांक।
30. जियोडेटिक निर्देशांक
भौगोलिक अक्षांश B के बीच का कोण है
भूमध्यरेखीय तल और सतह के लिए सामान्य
किसी दिए गए बिंदु पर दीर्घवृत्त। 0 से 90 . तक की गिनती
डिग्री उत्तर (अक्षांश उत्तर) और दक्षिण (दक्षिण)
अक्षांश)
जियोडेटिक देशांतर L के बीच का डायहेड्रल कोण है
अंक। 0 से 180 डिग्री पूर्व में गिना जाता है
(पूर्वी देशांतर) और पश्चिम (पश्चिम देशांतर)
जियोडेटिक ऊंचाई एचजी - बिंदु से दूरी
अंडाकार की सतह के पर्यवेक्षक। वह
दीर्घवृत्त की सतह से सामान्य के साथ मापा जाता है
उसके। वर्तमान में, विमान पर एनजी हो सकता है
केवल उपग्रह द्वारा निर्धारित
नेविगेशन सिस्टम।
30
31. जियोडेटिक ऊंचाई।
ऑर्थोमेट्रिक ऊंचाई हॉर्ट को स्तर से मापा जाता है
साहुल रेखा की दिशा में जियोइड।
दीर्घवृत्ताभ की सतह पर जियोइड का अतिरिक्त एन
इस बिंदु को जियोइड तरंग कहा जाता है
जियोडेटिक ऊंचाई एचजी
31
32. गोलाकार निर्देशांक
33. गोलाकार निर्देशांक
गोलाकार अक्षांश φ समतल के बीच का कोण है
भूमध्य रेखा और दिशा गोले के केंद्र से दी गई
बिंदु।
गोलाकार देशांतर - के बीच द्विफलकीय कोण
प्राइम मेरिडियन और दिए गए मेरिडियन के विमान
अंक।
मेरिडियन एक बड़ा वृत्त है, जिसका तल गुजरता है
पृथ्वी के घूर्णन की धुरी के माध्यम से।
समानांतर - एक छोटे वृत्त का चाप, जिसका तल
पृथ्वी के घूर्णन की धुरी के लंबवत और इसलिए,
भूमध्य रेखा के समानांतर।
भूमध्य रेखा एक बड़ा वृत्त है, जिसका तल
33
पृथ्वी के घूर्णन की धुरी के लंबवत।
34. मानचित्र पर अक्षांश और देशांतर का निर्धारण।
35. थीम № 1 हवाई नेविगेशन की मूल बातें
36. लैंडमार्क का अज़ीमुथ (असर)।
21
अज़ीमुथ,
या
सहन करना
मील का पत्थर (अज़ीमुथ, असर)
संलग्न कोने कहा जाता है
उत्तर की ओर . के बीच
मध्याह्न रेखा से गुजरना
दिए गए बिंदु, और दिशा
पर
नमूदार
संदर्भ बिन्दु।
दिगंश
(सहन करना)
सीमाचिह्न
गिना हुआ
से
उत्तरी
दिशाओं
मध्याह्न
इससे पहले
मार्गदर्शन करने के निर्देश
0 से 360 ° दक्षिणावर्त।
37. दिए गए ट्रैक कोण और दिए गए ट्रैक की एक रेखा।
22
उड़ान की तैयारी करते समय, निर्दिष्ट
मार्ग बिंदु से जुड़ते हैं
नक्शा
रेखा,
कौन
वी
विमान नेविगेशन
बुलाया
किसी दिए गए पथ की रेखा (LZP)
(वांछित ट्रैक, डीटीके)। ...
निर्दिष्ट पाठ्यक्रम कोण (ZPU)
संलग्न कोने कहा जाता है
उत्तर की ओर . के बीच
मेरिडियन और दी गई रेखा
रास्ते।
वह
गिना हुआ
से
उत्तरी
दिशाओं
रेखा की दिशा में मेरिडियन
दिया गया
रास्ता
पर
प्रति घंटा
0 ° से 360 ° तक तीर।
38.
23
प्रश्न 6. सतह पर मूल रेखाएँ विश्व
39. ट्रैक लाइन और पोजीशन लाइन।
24
विमान की ट्रैक लाइन जमीन पर प्रक्षेपण है।
अंतरिक्ष में इसके आंदोलन के प्रक्षेपवक्र की सतह। वर्तमान में
समय, पथ की दो पंक्तियों का मुख्य रूप से उपयोग किया जाता है: ऑर्थोड्रोम और
लोक्सोड्रोमिया।
स्थिति रेखा बिंदुओं का स्थान है।
संभावित
स्थान
हवाई जहाज,
उपयुक्त
मापा नेविगेशन पैरामीटर का स्थिर मान। वी
वैमानिकी में निम्नलिखित मुख्य पंक्तियों का उपयोग किया जाता है
प्रावधान:
ऑर्थोड्रोमिक असर लाइन;
समान दिगंश (रेडियो बीयरिंग) की रेखा;
समान दूरी की रेखा;
40. ऑर्थोड्रोमी।
25
ऑर्थोड्रोमिया - एक महान वृत्त का चाप, जो सबसे छोटा है
ग्लोब की सतह पर दो बिंदुओं के बीच की दूरी।
ऑर्थोड्रोमी मेरिडियन को अलग-अलग कोणों से पार करती है। वी
किसी विशेष मामले में, यह मेरिडियन और भूमध्य रेखा के साथ मेल खा सकता है
41. ऑर्थोड्रोमी।
42. रूढ़िवादिता के मुख्य गुण।
26
ऑर्थोड्रोमिया:
बिंदुओं के बीच सबसे छोटी दूरी की रेखा है
ग्लोब की सतह;
विभिन्न असमान के तहत मेरिडियन को पार करता है
ध्रुवों पर मेरिडियन के अभिसरण के कारण कोण;
उड़ान चार्ट पर दो बिंदुओं के बीच ऑर्थोड्रोमी,
1000 - 1200 किमी तक की दूरी पर स्थित,
सीधी रेखा। इस मामले में, ट्रैक कोण और पथ की लंबाई साथ में
ऑर्थोड्रोमी को मानचित्र पर मापा जाता है। लम्बी दूरी
ऑर्थोड्रोमी उत्तलता की ओर एक घुमावदार रेखा द्वारा रखी जाती है
ध्रुव को। इस मामले में, ट्रैक कोण और ट्रैक की लंबाई की गणना की जाती है
विशेष सूत्र।
43. लोक्सोड्रोमिया
लोक्सोड्रोमिया
रेखा
पर
सतह
सांसारिक
एक ही ट्रैक कोण पर मेरिडियन को पार करना।
27
गेंद,
44. लोक्सोड्रोमिया
45. लॉक्सोड्रोम के मुख्य गुण।
28
ग्लोब की सतह पर, लॉक्सोड्रोम का रूप होता है
स्थानिक लघुगणकीय सर्पिल जो झुकता है
ग्लोब अनंत बार और प्रत्येक क्रांति के साथ धीरे-धीरे
ध्रुव के पास जाता है, लेकिन उस तक कभी नहीं पहुंचता।
लोक्सोड्रोमिया में निम्नलिखित गुण हैं:
एक स्थिर कोण पर और सतह पर मेरिडियन को पार करता है
पृथ्वी का उभार भूमध्य रेखा की ओर निर्देशित है;
- लॉक्सोड्रोम के साथ पथ हमेशा ऑर्थोड्रोम के पथ से लंबा होता है, के लिए
विशेष मामलों को छोड़कर जब उड़ान होती है
मेरिडियन या भूमध्य रेखा।
46. बराबर अज़ीमुथ की रेखा।
29
बराबर अज़ीमुथ की रेखा (समान रेडियो असर की रेखा) प्रत्येक बिंदु पर एक रेखा जिसमें एक रेडियो नेविगेशन बिंदु (आरएनटी) होता है
रेडियो स्टेशन के समान वास्तविक असर के तहत असर
(वाईपीआरईएस)। स्थिति रेखा के समान अज़ीमुथ रेखा
रेडियो स्टेशन के असर को मापने के लिए उपयोग किया जाता है
रेडियो कम्पास।
47. स्थिति की रेखाएँ।
30
समान दूरियों की रेखा - एक रेखा, जिसके सभी बिंदु
कुछ निश्चित . से समान दूरी पर हैं
अंक। ग्लोब की सतह पर, समान दूरी की एक रेखा
एक छोटे वृत्त की परिधि का प्रतिनिधित्व करता है। एक पंक्ति के रूप में
समान दूरी की रेखा की स्थिति का उपयोग तब किया जाता है जब
रेंजफाइंडर और गोनियोमेट्रिक सिस्टम का उपयोग करके दूरी को मापना।
समान दूरी के अंतर की एक रेखा - एक रेखा, प्रत्येक में
जिस बिंदु से दो निश्चित बिंदुओं की दूरी के बीच का अंतर
पृथ्वी की सतह पर (रेडियो स्टेशन) स्थिर है
आकार। पता लगाने में उपयोग पाता है
डिफरेंशियल-रेंजफाइंडर नेविगेशन सिस्टम का उपयोग करना।
48.
31
प्रश्न 6. भौगोलिक निर्देशांक
49. भौगोलिक निर्देशांक।
32
ज्योग्राफिक
COORDINATES
यह है
कोने
मात्रा,
सतह पर किसी दिए गए बिंदु की स्थिति को परिभाषित करना
पृथ्वी दीर्घवृत्त। इस प्रणाली में प्रारंभिक विमान
प्राइम मेरिडियन और भूमध्य रेखा के विमान हैं, और
कोणीय मूल्यों का समन्वय करता है - अक्षांश और देशांतर।
दीर्घवृत्त के केंद्र से गुजरने वाले समानांतर को कहा जाता है
भूमध्य रेखा।
वी
गुणवत्ता
प्रारंभिक
मुह बोली बहन
ग्रीनविच
मध्याह्न रेखा (मुख्य केंद्र के केंद्र से गुजरने वाली मध्याह्न रेखा
ग्रीनविच वेधशाला)
ज्योग्राफिक
COORDINATES
प्राप्त किया
वी
परिणाम
जियोडेटिक माप कहलाते हैं - जियोडेटिक।
50. भौगोलिक अक्षांश।
33
भौगोलिक
अक्षांश
(अक्षांश) के बीच का कोण कहलाता है
भूमध्यरेखीय तल और सामान्य to
किसी दिए गए में दीर्घवृत्तीय सतह
बिंदु (एम)।
अक्षांश को समतल से मापा जाता है
भूमध्य रेखा से ध्रुवों तक 0 से 90 ° to
उत्तर या दक्षिण।
उत्तर
अक्षांश
गिनता
सकारात्मक,
दक्षिण
नकारात्मक।
सभी बिंदु एक पर पड़े हैं
समानांतर,
पास होना
वही
अक्षांश।
51. भौगोलिक देशांतर।
34
भौगोलिक देशांतर
(देशांतर)
बुलाया
समतल के बीच द्विफलकीय कोण
प्रारंभिक
मध्याह्न
तथा
विमान
मध्याह्न
दिया गया
अंक
(एम),
या
लंबाई
आर्क्स
भूमध्य रेखा, डिग्री में व्यक्त,
प्रधान मध्याह्न रेखा और के बीच
इस बिंदु का मेरिडियन।
देशान्तर
मापा
वी
डिग्री।
उलटी गिनती
चल रहा है
से
पूर्व में प्रधान मध्याह्न रेखा और
पश्चिम से 0 से 180 ° तक। पूर्व का
देशांतर को सकारात्मक माना जाता है,
वेस्टर्न
गिनता
नकारात्मक।
सभी बिंदु एक पर पड़े हैं
मध्याह्न रेखा समान होती है
देशांतर।
साथ
गोलाकार
37
अक्षांश
बुलाया
इंजेक्शन,
बंदी
के बीच
विमान
भूमध्य रेखा
तथा
इस बिंदु पर दिशा
से
केंद्र
लौकिक
गोले
गोलाकार
अक्षांश
केंद्र कोण द्वारा मापा जाता है
या उसी में मेरिडियन का चाप
सीमा,
क्या
तथा
अक्षांश
भौगोलिक।
कैदियों
के बीच
विमान
प्रारंभिक
मध्याह्न
तथा
विमान
किसी दिए गए बिंदु का मेरिडियन। वह
एक ही सीमा के भीतर मापा जाता है
भौगोलिक देशांतर के रूप में।
57. जियोडेटिक समन्वय प्रणाली।
39
ज्योग्राफिक
प्रणाली
COORDINATES
एक
निजी
गोलाकार का मामला। मुख्य के लिए
इस प्रणाली में विमान हैं
विमान
ज्योग्राफिक
भूमध्य रेखा और प्रारंभिक का तल
मध्याह्न भौगोलिक प्रणाली
मेरिडियन के रूप में निर्देशांक और
समानताएं
लागू
पर
सब
नेविगेशन मैप्स और is
बुनियादी
के लिये
परिभाषाएं
मानचित्रों पर बिंदुओं के निर्देशांक।
58. ऑर्थोड्रोमिक समन्वय प्रणाली।
40
ऑर्थोड्रोमिक
प्रणाली
COORDINATES
एक
भी
गोलाकार
प्रणाली,
लेकिन
साथ
मनमाना
स्थान
डंडे
वह
लागू
वी
गुणवत्ता
बुनियादी
प्रणाली
COORDINATES
वी
स्वचालित
नौवहन
उपकरण,
जो निर्देशांक परिभाषित करते हैं
विमान की सीटें
59.
41
इस प्रणाली में, मुख्य अक्षों के लिए
COORDINATES
स्वीकार किए जाते हैं
दो
ऑर्थोड्रोमी, जिसने इसे निर्धारित किया
शीर्षक।
ऑर्थोड्रोमिया,
लक्ष्य रेखा के साथ संरेखित
पथ या मार्ग की धुरी के साथ,
मुख्य कहा जाता है और स्वीकार किया जाता है
वाई-अक्ष के लिए यह है, जैसा कि यह था,
सशर्त
भूमध्य रेखा।
अन्य
ऑर्थोड्रोमी,
सीधा
मुख्य, बिंदु के माध्यम से खींचा गया है
प्रारंभ
उलटी गिनती
COORDINATES
तथा
स्वीकार किए जाते हैं
प्रति
एक्सिस
एक्स।
इस
ऑर्थोड्रोमी है
सशर्त मध्याह्न रेखा।
60. सामान्य ऑर्थोड्रोमिक समन्वय प्रणाली।
44
आयताकार
प्रणाली
COORDINATES
लागू
के लिये
प्रोग्रामिंग
करने के लिए स्वचालित प्रविष्टि
उतरना। इस मामले में शुरुआत
निर्देशांक केंद्र के साथ संरेखित हैं
रनवे, और वाई-अक्ष दिशा के साथ
उतरना। मुख्य बिंदुओं के लिए
योजनाओं
प्रवेश
अग्रिम रूप से
परिभाषित करें
आयताकार
निर्देशांक,
की इजाजत दी
उत्पाद
करने के लिए स्वचालित प्रविष्टि
अवतरण
63. ध्रुवीय समन्वय प्रणाली।
45
ध्रुवीय
प्रणाली
निर्देशांक समतल है
प्रणाली।
इस प्रणाली में, स्थिति
अंक
वी
स्थान
निर्धारित
दो
मात्रा:
अज़ीमुथ (ए);
क्षैतिज
रेंज (डी) रिश्तेदार
रेडियो नेविगेशन बिंदु या
एक निश्चित मील का पत्थर
ध्रुवीय समन्वय प्रणाली का उपयोग करते समय लागू किया जाता है
गोनियोमेट्रिक-रेंजफाइंडर रेडियो-तकनीकी नेविगेशन सिस्टम।
हवाई नेविगेशन
व्याख्यान संख्या २। पृथ्वी के आकार और आयामों के बारे में जानकारी ………………………………… 7
व्याख्यान संख्या 3. विमान के सापेक्ष निर्देशांक का निर्धारण ……………… 16
व्याख्यान क्रमांक ४. उड़ान के लिए नेविगेशन तैयारी ……………………………… ..22
व्याख्यान संख्या 5. सामान्य नियमहवाई नेविगेशन …………………………… 25
व्याख्यान संख्या 6. नेविगेशन के संदर्भ में उड़ान सुरक्षा सुनिश्चित करना। नेविगेशन समर्थन की सामग्री के लिए आवश्यकताएँ
उड़ानें ………………………………………………… ..29
व्याख्यान संख्या 7. हेडिंग सिस्टम का अनुप्रयोग …………………………………… .37
व्याख्यान संख्या 8। दृश्य अभिविन्यास ………………………………… 41
व्याख्यान क्रमांक 9. डॉपलर ग्राउंड स्पीड और ड्रिफ्ट एंगल का अनुप्रयोग। DISS की नेविगेशन विशेषताएं, जमीन की गति को मापने का सिद्धांत, DISS का उपयोग करके बहाव कोण। कोर्स-डॉपलर माप विमान निर्देशांक, कोर्स-डॉपलर नेविगेशन कॉम्प्लेक्स …………………………………… 47
व्याख्यान संख्या 10। गैर-स्वायत्त नेविगेशन सिस्टम ………………………… 51
व्याख्यान क्रमांक 11. रेंजफाइंडर रेडियो नेविगेशन सिस्टम ………………… ..59
व्याख्यान संख्या 12. गोनियोमेट्रिक-रेंजफाइंडर नेविगेशन सिस्टम का अनुप्रयोग65
व्याख्यान संख्या 13. आवेदन रडार स्टेशनउड़ान में …………… ..69
व्याख्यान क्रमांक 14. रेडियो नेविगेशन के सैटेलाइट सिस्टम ………………………… .75
प्रयुक्त साहित्य की सूची ……………………………………… 79
व्याख्यान संख्या १।
बुनियादी नेविगेशन अवधारणाएं और परिभाषाएं
"एयर नेविगेशन" एक प्रोग्राम किए गए प्रक्षेपवक्र के साथ विमान चलाने का विज्ञान है।
उड़ान हवा में एक विमान की एक जटिल गति है। इसे द्रव्यमान के केंद्र के स्थानांतरीय गति और द्रव्यमान के केंद्र के चारों ओर कोणीय गति में विघटित किया जा सकता है। एक विमान की अनुवाद गति की प्रक्रिया में उसकी स्थिति का वर्णन करने के लिए कई बिंदुओं और रेखाओं का उपयोग किया जाता है। वे विमान के द्रव्यमान के केंद्र की गति से सीधे संबंधित नेविगेशन अवधारणाओं को बनाए रखने के आधार के रूप में कार्य करते हैं। इसमे शामिल है: हवाई जहाज की जगह(पीएमएस), हवाई जहाज़ की सीट(एमएस), उड़ान मार्ग(टीपी), ट्रैक लाइन(एलपी)।
हवाई जहाज की जगह- अंतरिक्ष में वह बिंदु जिस पर वर्तमान में विमान के द्रव्यमान का केंद्र स्थित है।
हवाई जहाज की सीट- पृथ्वी की सतह पर वह बिंदु जिस पर वर्तमान में विमान के द्रव्यमान का केंद्र प्रक्षेपित होता है। स्थानिक विमान की स्थिति और विमान की स्थिति निर्धारित और वास्तविक हो सकती है।
उड़ान मार्ग- आंदोलन के दौरान विमान के द्रव्यमान के केंद्र द्वारा वर्णित स्थानिक रेखा। इसे सेट किया जा सकता है, आवश्यक और वास्तविक। अंतर्गत अनुपात-अस्थायी प्रक्षेपवक्र उड़ान को न केवल अंतरिक्ष में, बल्कि समय में भी एक उड़ान प्रक्षेपवक्र के रूप में समझा जाता है। दिए गए स्पेस-टाइम प्रक्षेपवक्र को प्रोग्राम्ड कहा जाता है।
पथ रेखापृथ्वी की सतह पर विमान के उड़ान पथ का प्रक्षेपण है। पृथ्वी की सतह पर प्रोग्राम किए गए उड़ान पथ के प्रक्षेपण को किसी दिए गए पथ (LAP) की रेखा कहा जाता है। जिस रेखा के साथ विमान को उड़ना चाहिए उसे उड़ान पथ कहा जाता है।
उड़ान प्रोफ़ाइल- एक सीधी रेखा में तैनात उड़ान मार्ग के माध्यम से खींचे गए ऊर्ध्वाधर विमान पर प्रोग्राम किए गए प्रक्षेपवक्र का प्रक्षेपण कहा जाता है। विमान के वास्तविक उड़ान पथ की पृथ्वी की सतह पर प्रक्षेपण को वास्तविक उड़ान पथ (एलएफपी) कहा जाता है। वीटी और एमवीपी मार्गों के साथ स्थापित हैं, जो ऊंचाई और चौड़ाई के गलियारों में सीमित हैं हवाई क्षेत्र.
वीटी- हवाई क्षेत्र में एक गलियारा, ऊंचाई और चौड़ाई में सीमित, सभी विभागों के विमानों द्वारा उड़ानों के लिए डिज़ाइन किया गया, एन-रूट एयरोड्रोम प्रदान किया गया और रेडियो नेविगेशन, हवाई यातायात नियंत्रण और प्रबंधन से लैस है।
एमवीपी- हवाई क्षेत्र में एक गलियारा, ऊंचाई और चौड़ाई में सीमित और स्थानीय हवाई संचार के कार्यान्वयन में विमान द्वारा उड़ानों के लिए अभिप्रेत है।
कई नेविगेशन समस्याओं को हल करते समय, कई समन्वय प्रणालियों का उपयोग किया जा सकता है। सामान्य तौर पर, उनकी पसंद और अनुप्रयोग नेविगेशन के तकनीकी साधनों की प्रकृति और कंप्यूटिंग उपकरणों की क्षमताओं पर निर्भर करते हैं। किसी भी प्रणाली में एमपीएस और एमएस की स्थिति निर्देशांक द्वारा निर्धारित की जाती है, जो रैखिक या कोणीय मूल्यों द्वारा निर्धारित की जाती है। नेविगेशन में, सबसे आम भू-केंद्रित प्रणालियों में शामिल हैं: ज्योग्राफिक(खगोलीय और भूगर्भीय), सामान्य गोलाकार, ऑर्थोड्रोमिकतथा भूमध्यरेखीय.
निम्नलिखित का उपयोग मुख्य भौगोलिक प्रणालियों के रूप में किया जाता है: आयताकार सही सिस्टमनिर्देशांक (सामान्य जमीन और प्रारंभ), द्विध्रुवी(सपाट और गोलाकार), अतिपरवलिकतथा क्षैतिज.
भूगर्भ की सतह पर पृथ्वी की भौतिक सतह को प्रक्षेपित करते समय, एक खगोलीय समन्वय प्रणाली का उपयोग किया जाता है। इस प्रणाली में विमान के स्थान के निर्देशांक हैं:
भौगोलिक समन्वय प्रणाली:
भौगोलिक अक्षांश जी - भूमध्यरेखीय तल और सामान्य (साहुल रेखा) के बीच एक दिए गए बिंदु M पर दीर्घवृत्त (जियोइड) की सतह के बीच का कोण (भूमध्य रेखा से ध्रुवों तक 0 o से 90 o तक मापा जाता है);
भौगोलिक देशांतर जी प्रारंभिक (ग्रीनविच) मेरिडियन और किसी दिए गए बिंदु एम के मेरिडियन के विमानों के बीच एक डायहेड्रल कोण है। इसे 0 ओ से 180 ओ से पूर्व और पश्चिम में मापा जाता है (जब 0 ओ से कुछ समस्याओं को हल किया जाता है) 360 पूर्व की ओर)।
सामान्य गोलाकार अक्षांश भूमध्यरेखीय तल और ग्लोब के केंद्र से उस बिंदु तक की दिशा के बीच का कोण है जो दीर्घवृत्त के संबंधित बिंदु की छवि है। एक ही सीमा के भीतर केंद्रीय कोण या मेरिडियन चाप द्वारा मापा जाता है। भौगोलिक अक्षांश क्या है;
सामान्य गोलाकार देशांतर प्रारंभिक (ग्रीनविच मेरिडियन) के विमान और किसी दिए गए बिंदु के मेरिडियन के विमान के बीच का डायहेड्रल कोण है। इसे या तो भूमध्य रेखा के तल में केंद्रीय कोण द्वारा या भूमध्य रेखा के चाप द्वारा प्रारंभिक मेरिडियन से किसी दिए गए बिंदु के मेरिडियन तक भौगोलिक देशांतर के समान सीमा के भीतर मापा जाता है।
उड़ान ऊंचाईमूल से विमान तक ली गई एक निश्चित स्तर से ऊर्ध्वाधर दूरी है।
दूसरे समूह के तत्व हैं: ग्राउंड स्पीड, ग्राउंड एंगल, ड्रिफ्ट एंगल, एयरस्पीड, कोर्स और वर्टिकल स्पीड।
उड़ान की गतिवायुयान का निर्धारण वायुयान के चारों ओर की वायु और पृथ्वी की सतह दोनों के संबंध में होता है।
हवाई जहाज का शीर्षक- क्षैतिज तल में कोण को m . कहते हैं  मूल के रूप में ली गई दिशा के बीच 1
विमान के स्थान के बिंदु पर, और इसके अनुदैर्ध्य अक्ष के इस विमान पर प्रक्षेपण 2
(अंजीर। 1.7)।
मूल के रूप में ली गई दिशा के बीच 1
विमान के स्थान के बिंदु पर, और इसके अनुदैर्ध्य अक्ष के इस विमान पर प्रक्षेपण 2
(अंजीर। 1.7)।
जमीनी गति उड़ानएमएस की पृथ्वी की सतह पर गति की गति कहलाती है, जो ट्रैक लाइन के लिए स्पर्शरेखा से निर्देशित होती है 2 .
ट्रैक कोणमूल और ट्रैक लाइन (वेक्टर ग्राउंड स्पीड W) के रूप में ली गई दिशा के बीच का कोण कहलाता है। यह, पाठ्यक्रम की तरह, मूल दक्षिणावर्त से 0 o से 360 o तक सूचित किया जाता है।
बहाव कोण- क्षैतिज तल में विमान को एयरस्पीड वेक्टर और ग्राउंड स्पीड वेक्टर के बीच का कोण कहा जाता है। इसे सकारात्मक माना जाता है यदि ग्राउंड स्पीड वेक्टर एयरस्पीड वेक्टर के दाईं ओर स्थित है, तो नकारात्मक - यदि बाईं ओर है।
लंबवत्त गति W को पृथ्वी W (चित्र 1.7) के सापेक्ष विमान के अनुवाद संबंधी गति की कुल गति के वेक्टर का ऊर्ध्वाधर घटक कहा जाता है।
ऊपर चर्चा की गई उड़ान नेविगेशन तत्व निर्दिष्ट, वास्तविक और आवश्यक हो सकते हैं। उदाहरण के लिए, वास्तविक ट्रैक लाइनें वास्तविक ट्रैक हैं, लक्ष्य ट्रैक लाइनें लक्ष्य ट्रैक हैं, और लक्ष्य ट्रैक लाइनें लक्ष्य ट्रैक हैं।
नेविगेशन समस्या का निर्माण वायु पर्यावरण और पृथ्वी की सतह के सापेक्ष नेविगेशन और उड़ान मापदंडों के क्रमादेशित, वास्तविक और आवश्यक मूल्यों के निर्धारण पर आधारित है, जो संबंधित उड़ान पथों की विशेषता है।
किसी भी उद्देश्य की एक उड़ान प्रोग्राम किए गए प्रक्षेपवक्र की गणना और किसी दिए गए नेविगेशन उड़ान कार्यक्रम के संकलन (विकास) से पहले होती है; गणना की गई प्रोग्राम प्रक्षेपवक्र, जो सबसे सुरक्षित और सबसे किफायती उड़ान प्रदान करती है, को विभिन्न समन्वय में विश्लेषणात्मक या ग्राफिक रूप से सेट किया जा सकता है सिस्टम विश्लेषणात्मक रूप से, यह विमान के द्रव्यमान के केंद्र की गति के परिमित समीकरणों द्वारा व्यक्त किया जाता है, जो व्यापक ऑर्थोड्रोमिक आयताकार समन्वय प्रणाली में रूप है:
 (1.9)
(1.9)
जहां जेड जेड, एस जेड, एच जेड - दिए गए (क्रमादेशित) पीएमएस के ऑर्थोड्रोमिक आयताकार निर्देशांक एक निश्चित समय पर टी।
क्रमादेशित उड़ान पथ को इंगित करने के लिए, उड़ान मार्ग, इसके नियंत्रण बिंदुओं का उड़ान समय और उड़ान प्रोफ़ाइल को चालक दल को सौंपा गया है। नेविगेशन और पायलटिंग के तकनीकी साधनों की क्षमताओं के आधार पर प्रोग्राम किए गए प्रक्षेपवक्र के आधार पर विकसित नेविगेशन प्रोग्राम को नेविगेशन कंप्यूटर के स्टोरेज डिवाइस में दर्ज किया जा सकता है और नेविगेशन स्थिति संकेतक, स्वचालित मैप टैबलेट, फ्लाइट चार्ट पर प्रदर्शित किया जा सकता है। , उड़ान लॉग और उड़ान योजनाएं। नेविगेशन प्रोग्राम के अनुसार प्रोग्राम किए गए प्रक्षेपवक्र के साथ उड़ान उड़ान मैनुअल के अनुसार की जानी चाहिए। वे इस प्रकार के विमान के उड़ान संचालन और संचालन पर नियमों, शर्तों और प्रतिबंधों को विनियमित करते हैं।
प्रक्षेपवक्र की प्रकृति विमान के उड़ान मोड द्वारा निर्धारित की जाती है। उत्तरार्द्ध, बदले में, अलग-अलग द्वारा विशेषता है नौवहनऔर एरोबेटिक पैरामीटर, जिन्हें यांत्रिक और ज्यामितीय मात्रा और विमान नेविगेशन में उपयोग किए जाने वाले उनके डेरिवेटिव के रूप में समझा जाता है।
नेविगेशन और उड़ान पैरामीटर उड़ान के नेविगेशन तत्वों के साथ मेल खा सकते हैं या साधारण संबंधों से उनसे संबंधित हो सकते हैं। नेविगेशन मापदंडों में शामिल हैं: विमान की स्थानिक स्थिति, जमीन की गति, ट्रैक कोण, बहाव कोण, ऊर्ध्वाधर गति, इन मापदंडों के डेरिवेटिव, और अन्य के निर्देशांक।
प्रति एरोबेटिकशामिल हैं: एयरस्पीड, एयरक्राफ्ट हेडिंग, वायु पर्यावरण के सापेक्ष लंबवत गति, कोणीय गति, यॉ, रोल, पिच इत्यादि। हवाई यातायात नियंत्रण, नेविगेशन और एरोबेटिक उड़ान मोड में उपयोग किए जाने वाले पैरामीटर के इस विभाजन के अनुसार प्रतिष्ठित हैं।
नियंत्रण प्रश्न
हवाई नेविगेशन का विषय क्या है?
उड़ान पथ क्या है?
नेविगेशन में आमतौर पर कौन से जियोडेटिक कोऑर्डिनेट सिस्टम का उपयोग किया जाता है?
उड़ान पथ की प्रकृति क्या निर्धारित करती है?
कीवर्ड:
विषय हवाई नेविगेशन, पीएमएस, एमएस, टीपी, एलपी, उड़ान प्रोफ़ाइल, वीटी, एमवीएल, खगोलीय समन्वय प्रणाली, जियोडेटिक समन्वय प्रणाली
भौगोलिक समन्वय प्रणाली, सामान्य समन्वय प्रणाली, उड़ान ऊंचाई, विमान शीर्षक, जमीन की गति, ट्रैक कोण, बहाव कोण।
संघीय हवाई परिवहन एजेंसी
प्रशिक्षण केंद्र "चेलविया"
हवाई नेविगेशन
ट्यूटोरियल
चेल्याबिंस्क
पीपीएल (ए), स्टडी गाइड, एयर नेविगेशन, 2013, चेल्याबिंस्क,
"यूटीसी" चेलविया "।
यह ट्यूटोरियल भू-तकनीकी और रेडियो तकनीकी साधनों, विमानन कार्टोग्राफी की मूल बातें, उड़ान के नेविगेशन तत्वों का उपयोग करके हवाई नेविगेशन के सिद्धांत और व्यवहार के मुख्य मुद्दों की जांच करता है।
मार्गों के साथ-साथ उड़ानों की तैयारी, कार्यान्वयन और सुरक्षा के साथ-साथ विमान नेविगेशन के व्यावहारिक उपयोग पर बहुत ध्यान दिया जाता है।
संक्षेप
अध्याय 1. एयर नेविगेशन की मूल बातें …………………………………… 5
अध्याय 2. एविएशन कार्टोग्राफी …………………………………………… .29
अध्याय 3. स्थलीय चुंबकत्व और वीएस पाठ्यक्रम ………………………। ……………… 53
अध्याय 4. समय। समय की गणना …………………………………… .. …… .64
अध्याय 5. नेवीगेशन रूलर NL-10m …………………………………… 69
अध्याय 6. ऊंचाई और उड़ान की गति …………………………………… ..… … 79
अध्याय 7. वायुयान की उड़ान पर वायु का प्रभाव …………………………………… .९०
अध्याय 8. दृश्य अभिविन्यास ………………………………………… 105
अध्याय 9. गोनियोमेट्रिक रेडियो नेविगेशन सिस्टम का अनुप्रयोग ………. 131
अध्याय 10. ओएसबी पर उतरने के लिए दृष्टिकोण ………………………………… ..… 149
अध्याय 11. प्रारंभिक प्रशिक्षण के लिए विमान नेविगेशन उपकरण का सामान्य अवलोकन ……………………………………………………………………… ..… ..155
अध्याय 12. नेविगेशन के लिए पाठ्यक्रम उपकरणों और प्रणालियों के उपयोग की विशेषताएं …………………………………………………… ..…। 163
अध्याय 13. नेविगेशन के लिए एक स्वचालित रेडियो कंपास का उपयोग करने की विशेषताएं ………………………………………………………… ..… ……… 174
अध्याय 14. उपग्रह नेविगेशन प्रणाली का उपयोग करने की विशेषताएं
जीएनएस ४३० ………………………………………………………………… ..176
अध्याय 15. हवाई नौवहन की सुरक्षा सुनिश्चित करना ……………… ..189
संदर्भ ………………………………… ……… .209
संकेताक्षर |
|
हवाई जहाज की सीट |
|
निर्दिष्ट ट्रैक कोण |
|
वास्तविक ट्रैक कोण |
|
बहाव कोण |
|
हवाई जहाज |
|
हवाई यातायात सेवाएं |
|
उड़ान मैनुअल |
|
संघीय उड्डयन विनियम |
|
रूसी संघ |
|
कठिन मौसम की स्थिति |
|
उड़ानों का हवाई नेविगेशन समर्थन |
अध्याय 1. वायु नेविगेशन की मूल बातें
१.१ नौवहन शब्दावली और परिभाषाएँ
शब्द "एयर नेविगेशन" लैटिन "नेविगेटियो" से आया है, जिसका शाब्दिक अर्थ है "नेविगेशन", और शब्द के व्यापक अर्थ में। लेकिन जल्द ही इसका एक संकुचित अर्थ हो गया: गतिविधि (और,
बेशक, विज्ञान जो इस गतिविधि का अध्ययन करता है) जहाजों के सटीक और सुरक्षित नेविगेशन के कार्यान्वयन पर। पोत की स्थिति, पाठ्यक्रम और गति का निर्धारण करना, घेरने या चट्टानों को रोकना, सर्वोत्तम मार्ग चुनना - ये और समुद्री नेविगेशन के अन्य कार्य, जिन्हें अब अधिक बार नेविगेशन कहा जाता है, गैर-विशेषज्ञों के लिए भी समझ में आते हैं।
जैसे-जैसे लोगों ने अन्य वातावरणों में जाना शुरू किया, हवाई नेविगेशन (वायु नेविगेशन), साथ ही अंतरिक्ष, जमीन और यहां तक कि भूमिगत नेविगेशन भी दिखाई दिया। उनमें से किसी की मुख्य सामग्री समान है - वस्तु के स्थान और उसके आंदोलन के मापदंडों का निर्धारण, वांछित प्रक्षेपवक्र के साथ उसके आंदोलन को नियंत्रित करना। "एयर नेविगेशन" शब्द के साथ
अलग-अलग समय के लिए इस्तेमाल किया गया है, और कभी-कभी इस्तेमाल किया जाना जारी है, शब्द
"एयर नेविगेशन" और "एयर नेविगेशन"।
"एयर नेविगेशन" और "एयर नेविगेशन" शब्द पूर्ण पर्यायवाची हैं,
क्योंकि ग्रीक "एयर" का अर्थ हवा है। लेकिन शब्द का प्रयोग करें
"एयर नेविगेशन" स्पष्ट रूप से बेहतर है। पहला, छोटा, दूसरा,
पूरी तरह से इसी तरह की विदेशी भाषा की शर्तों से मेल खाती है (अंग्रेज़ी
"एयरनेविगेशन", फ्रेंच "नेविगेशन एरिएन"), और तीसरा, यह शब्द ऐतिहासिक रूप से पहले दिखाई दिया। "एयर नेविगेशन" शब्द, जिसे न केवल हवाई जहाज की ड्राइविंग के रूप में समझा जाता है, बल्कि हेलीकॉप्टर और अन्य विमान भी, जाहिरा तौर पर, "नेविगेशन" शब्द के अनुरूप दिखाई देते हैं।
कभी-कभी "रेडियो नेविगेशन", "खगोलीय नेविगेशन", "जड़त्वीय नेविगेशन" और इसी तरह के शब्दों का उपयोग किया जाता है। ये अलग-अलग प्रकार के नेविगेशन नहीं हैं, बल्कि एक ही नेविगेशन (वायु, समुद्र, अंतरिक्ष) हैं, लेकिन एक निश्चित प्रकार के तकनीकी साधनों का उपयोग करके किया जाता है।
(रेडियो इंजीनियरिंग, खगोलीय, आदि)। अगर हम हवाई नेविगेशन के बारे में बात करते हैं:
विज्ञान या अकादमिक अनुशासन, तो ये इसके खंड हैं जो कुछ प्रकार के नेविगेशन उपकरणों के उपयोग पर विचार करते हैं।
साथ ही, "एयर नेविगेशन" शब्द का प्रयोग अक्सर इसके मूल, व्यापक अर्थ में किया जाता है, जैसे सामान्य रूप से उड़ानें। ऐसे में, उदाहरण के लिए,
"शरद-शीतकालीन नेविगेशन", "वैमानिक जानकारी", "आईसीएओ एयर नेविगेशन कमीशन", आदि जैसे वाक्यांश। अवधि
"एयर नेविगेशन", जिसे एक संकीर्ण अर्थ में माना जाता है, के दो परस्पर संबंधित अर्थ हैं:
- एक निश्चित लक्ष्य को प्राप्त करने के लिए वास्तविकता में होने वाले लोगों की एक निश्चित प्रक्रिया या गतिविधि;
- एक विज्ञान या अकादमिक अनुशासन जो इस गतिविधि का अध्ययन करता है।
इनमें से पहले मान के लिए, निम्नलिखित परिभाषा दी जा सकती है।
वायु नेविगेशन - उड़ान में चालक दल द्वारा किया गया विमान प्रक्षेपवक्र नियंत्रण।
सामान्य तौर पर, नियंत्रण को नियंत्रण वस्तु की कमी के रूप में समझा जाता है (कि
वे क्या नियंत्रित करते हैं) वांछित स्थिति, राज्य, आदि के लिए। नेविगेशन में, एक विमान (एसी) को अंतरिक्ष में गतिमान बिंदु के रूप में माना जाता है और एक रेखा का वर्णन करता है - एक उड़ान पथ। उड़ान में, चालक दल इस बिंदु की गति को नियंत्रित करता है, अर्थात, अंतरिक्ष में इसकी गति, और एक पूरे के रूप में प्रक्षेपवक्र - इसका आकार, लंबाई, आदि। इस मामले में पीछा किए गए नियंत्रण उद्देश्य भिन्न हो सकते हैं, उदाहरण के लिए, में नागरिक और सैन्य उड्डयन।
यदि नागरिक विमानों के लिए दिए गए एक के साथ वास्तविक प्रक्षेपवक्र के निकटतम संभव संयोग को प्राप्त करना आवश्यक है, तो सैन्य विमानों के लिए कोई भी प्रक्षेपवक्र नहीं हो सकता है, और मुख्य कार्य होगा,
उदाहरण के लिए, किसी निश्चित समय पर लक्ष्य से सटीक निकास।
सामान्य तौर पर, इस परिभाषा में "प्रक्षेपवक्र" का अर्थ केवल अंतरिक्ष में एक रेखा नहीं है, बल्कि एक स्थानिक-अस्थायी प्रक्षेपवक्र है, यानी एक ऐसी रेखा जिस पर प्रत्येक बिंदु समय में एक निश्चित क्षण से मेल खाता है।
यह नेविगेशन कार्यों को ऐसे पारंपरिक कार्यों के रूप में संदर्भित करना संभव बनाता है जैसे नियत समय पर किसी दिए गए बिंदु से बाहर निकलना सुनिश्चित करना,
एक निर्धारित उड़ान सुनिश्चित करना, आदि। अवधारणा को स्पष्ट रूप से परिभाषित करना
हवाई नेविगेशन, एक बिंदु के रूप में विमान नियंत्रण के बारे में बात करने के लिए पर्याप्त है और प्रक्षेपवक्र नियंत्रण के बारे में बात करने की कोई आवश्यकता नहीं है। लेकिन कई कार्य हैं
पारंपरिक रूप से नौवहन, नौवहन, विशेष रूप से प्रक्षेपवक्र से संबंधित,
चूंकि संपूर्ण प्रक्षेपवक्र में अन्य गुण हैं जो इसके व्यक्तिगत बिंदु में निहित नहीं हैं। उदाहरण के लिए, प्रक्षेपवक्र की लंबाई, उड़ान के दौरान खपत ईंधन, पूरे प्रक्षेपवक्र पर निर्भर करता है, जैसा कि गणितज्ञ कहते हैं, इसके कार्य। इसलिए, नाविक द्वारा हल किए गए ईंधन की खपत के दृष्टिकोण से सबसे अच्छा प्रक्षेपवक्र चुनने का कार्य एक नेविगेशन कार्य है।
विमान को उसके उड़ान दल द्वारा नियंत्रित किया जाता है। विशेषज्ञ इस बात से सहमत हैं कि कोई फर्क नहीं पड़ता कि हवाई जहाज में कैसे सुधार होता है, निकट भविष्य में एक व्यक्ति, कम से कम यात्री परिवहन, अभी भी उनके केबिन में होंगे। लेकिन, निश्चित रूप से, चालक दल विभिन्न तकनीकी साधनों के व्यापक उपयोग के साथ नेविगेशन करता है। ये फंड अपने कार्यभार के एक महत्वपूर्ण हिस्से को चालक दल से हटा देते हैं, और सबसे उन्नत विमानों पर वे अप्रत्याशित परिस्थितियों में केवल नियंत्रण और निर्णय लेने के कार्यों को व्यक्ति के पीछे छोड़ देते हैं।
उड़ान नियंत्रण प्रक्रियाओं के पदानुक्रम में हवाई नेविगेशन का स्थान। यदि आप प्रश्न पूछते हैं "विमान की गति को कौन नियंत्रित करता है?", तो इसका स्पष्ट उत्तर प्राप्त करना कठिन है। यह अवधारणा बहुत बहुस्तरीय, श्रेणीबद्ध है।
बेशक, पायलट नियंत्रण पर कार्य करते हुए विमान को नियंत्रित करता है। लेकिन वह इसे इस तरह से करता है ताकि नाविक द्वारा उसे दिए गए पाठ्यक्रम, गति और ऊंचाई को बनाए रखा जा सके, जो कि उड़ान को भी नियंत्रित करता है। नाविक, बदले में, इन मापदंडों की गणना डिस्पैचर के निर्देशों के अनुसार करता है
(उदाहरण के लिए, दी गई ऊंचाई पर दिए गए बिंदु पर जाने के बारे में), जिसका अर्थ है कि डिस्पैचर विमान को नियंत्रित करता है। लेकिन वह मनमाने ढंग से नहीं, बल्कि दिए गए क्षेत्र में स्थापित यातायात पैटर्न के अनुसार प्रक्षेपवक्र भी निर्धारित करता है - मार्ग, गलियारे,
सोपानक यह पता चला है कि इन योजनाओं का गठन करने वाले हवाई यातायात प्रबंधन निकाय भी उड़ान नियंत्रण में भागीदार हैं। विमान नियंत्रण की इस श्रेणीबद्ध सीढ़ी को ऊपर की ओर जारी रखा जा सकता है। लेकिन आप नीचे जारी रख सकते हैं, यह देखते हुए कि ऑटोपायलट स्टीयरिंग मशीनें वास्तव में विमान को नियंत्रित करती हैं ...
इस पदानुक्रम में हवाई नेविगेशन कहाँ है? यह वहाँ है और तब जब सूर्य को अंतरिक्ष में एक बिंदु के रूप में देखा जा सकता है, जिसकी गति को नियंत्रित किया जाना चाहिए। और इस प्रक्रिया को प्रबंधन पदानुक्रम के आसन्न स्तरों के साथ अलग करना काफी सरल है। जैसे ही हम बीसी को एक बिंदु के रूप में नहीं, बल्कि एक वस्तु के रूप में विचार करना शुरू करते हैं जिसमें आयाम होते हैं और इसलिए, एक कोणीय अभिविन्यास
(कोर्स, रोल, पिच), पायलटिंग शुरू होती है - कोणीय गति नियंत्रण। और जैसे ही कम से कम दो विमान दिखाई देते हैं और, परिणामस्वरूप, नए कार्य उत्पन्न होते हैं (अलग करना, खतरनाक मुठभेड़ों की रोकथाम) -
हवाई यातायात नियंत्रण शुरू होता है।
बेशक, पायलटिंग के अलावा उड़ान पथ को बदलने का कोई दूसरा तरीका नहीं है। पायलट एक रोल बनाता है और वायुगतिकीय बल विमान को अपने प्रक्षेपवक्र को बदलने के लिए मजबूर करते हैं। नेविगेशन पायलटिंग के माध्यम से किया जाता है और नियंत्रण के ये दो घटक अटूट रूप से जुड़े हुए हैं। यदि चालक दल में एक नाविक शामिल है, तो नेविगेशन कार्यों का समाधान उसे सौंपा गया है, हालाँकि,
बेशक, विमान का कमांडर (पायलट) इस प्रक्रिया पर नियंत्रण नहीं खोता है।
पायलट का कार्य प्रक्षेपवक्र को नियंत्रित करने के लिए नेविगेटर के आदेशों को निष्पादित करना है। यदि चालक दल में कोई नाविक नहीं है, तो पायलट एक ही समय में नेविगेशन और पायलटिंग दोनों करता है।
हवाई नेविगेशन के लिए आवश्यकताएँ।एक नागरिक विमान उड़ान का उद्देश्य, एक नियम के रूप में, यात्रियों या कार्गो को एक स्थान से दूसरे स्थान पर ले जाना, या एक निश्चित प्रकार का कार्य करना (निर्माण और स्थापना, हवाई फोटोग्राफी,
खोज और बचाव अभियान, आदि)। इन लक्ष्यों के कार्यान्वयन में, कुछ आवश्यकताओं को आमतौर पर हवाई नेविगेशन पर लगाया जाता है।
1) हवाई नेविगेशन सुरक्षा। यह मूलभूत आवश्यकता है। दरअसल, हवाई नेविगेशन को पेश करने का कोई मतलब नहीं हैचालक दल और यात्रियों के जीवन के लिए खतरा होने पर कोई अन्य आवश्यकताएं, यदि विमान अपने गंतव्य तक पहुंचने का कोई विश्वास नहीं है।
2) शुद्धता। नागरिक विमानों के लिए यह आवश्यकता महत्वपूर्ण है, क्योंकि वे पूर्व निर्धारित प्रक्षेपवक्र के साथ उड़ान भरते हैं। वायु नेविगेशन सटीकता वह डिग्री है जिस तक वास्तविक प्रक्षेपवक्र लक्ष्य तक पहुंचता है। सुरक्षा और उड़ान दक्षता दोनों सटीकता पर निर्भर करती हैं। चूंकि दिए गए प्रक्षेपवक्र का निर्माण होता है
ताकि वे सुरक्षित रहें (बाधाओं, अन्य प्रक्षेपवक्रों के साथ प्रतिच्छेद न करें), फिर जितना अधिक सटीक रूप से विमान उनका सामना करता है, कम जोखिम... दूसरी ओर, लक्ष्य पथ आमतौर पर यथासंभव कम निर्धारित किए जाते हैं। इसलिए, उड़ान जितनी सटीक होगी, प्रक्षेपवक्र उतना ही छोटा होगा और उड़ान का समय उतना ही कम होगा।
3) लाभप्रदता। उड़ान का समय जितना कम होगा, एक नियम के रूप में, उड़ान की लागत, जिसमें सभी संबद्ध लागतें शामिल हैं - कर्मचारियों के वेतन से लेकर ईंधन की खपत तक।
4) नियमितता। उड़ानें आम तौर पर एक निर्धारित आधार पर की जानी चाहिए।
प्रस्थान या आगमन में देरी से न केवल यात्रियों को असुविधा होती है, बल्कि महत्वपूर्ण आर्थिक नुकसान भी हो सकता है। उदाहरण के लिए, उच्च यातायात तीव्रता वाले हवाई क्षेत्रों में, स्टार्ट एप्रोच कंट्रोल पॉइंट पर पहुंचने में देरी से विमान को होल्डिंग क्षेत्र में भेजा जा सकता है, जहां यह ईंधन की बर्बादी के लिए एक अस्थायी "विंडो" की प्रतीक्षा करेगा।
हवाई नेविगेशन के मुख्य कार्य। हवाई नेविगेशन प्रक्रिया में तीन मुख्य कार्यों का समाधान शामिल है:
- किसी दिए गए प्रक्षेपवक्र का गठन (चयन);
- अंतरिक्ष में विमान के स्थान और उसके आंदोलन के मापदंडों का निर्धारण;
- एक नेविगेशन समाधान का गठन (विमान को किसी दिए गए प्रक्षेपवक्र में लाने के लिए नियंत्रण क्रियाएं)।
किसी दिए गए प्रक्षेपवक्र का निर्माण उड़ान से पहले शुरू होता है, आमतौर पर इससे बहुत पहले, जब दी गई ऊंचाइयों के वायुमार्ग का एक नेटवर्क स्थापित होता है। इस मामले में, यह कार्य स्वयं हवाई नेविगेशन से संबंधित नहीं है, बल्कि उड़ानों के हवाई नेविगेशन समर्थन से संबंधित है। लेकिन प्रक्षेपवक्र का निर्माण तुरंत उड़ान में भी हो सकता है, जब डिस्पैचर और कभी-कभी चालक दल स्वयं चुनता है कि किस बिंदु पर या किस रास्ते पर विमान का अनुसरण करना चाहिए। किसी दिए गए प्रक्षेपवक्र को एक या दूसरे तरीके से चुना जाता है, अर्थात वह प्रक्षेपवक्र जिसके साथ उड़ान भरना आवश्यक है,
सुरक्षित और किफायती दोनों होना चाहिए, विशेष रूप से ओवरलैप नहीं होना चाहिए
जमीनी बाधाओं के साथ और जितना संभव हो उतना छोटा होना चाहिए।
अंतरिक्ष में विमान की स्थिति का निर्धारण नेविगेशन के मुख्य और महत्वपूर्ण घटकों में से एक है, जो आमतौर पर चालक दल के प्रयासों का मुख्य फोकस है कि कुछ इसे सामान्य रूप से नेविगेशन के साथ समान करते हैं, अर्थात, उनका मानना है कि नेविगेशन केवल दृढ़ संकल्प है विमान की स्थिति के बारे में। दरअसल, ऑनबोर्ड और ग्राउंड नेविगेशन उपकरण का एक महत्वपूर्ण हिस्सा विमान के निर्देशांक निर्धारित करने के लिए डिज़ाइन किया गया है और अब तक, उपग्रह नेविगेशन सिस्टम के अपवाद के साथ, इसके साथ काम करना चालक दल के काम के समय का एक महत्वपूर्ण हिस्सा लेता है। लेकिन निर्देशांक के अलावा, विमान की गति के मापदंडों, यानी विमान की गति और दिशा और कभी-कभी इसके त्वरण को जानना आवश्यक है - इसके बिना किसी दिए गए प्रक्षेपवक्र को बनाए रखना असंभव है।
विमान की स्थिति निर्धारित होने के बाद और यह पता चला कि यह दिए गए प्रक्षेपवक्र पर नहीं है (और अधिकांश मामलों में यह करता है), विचलन मूल्य निर्धारित करना और नेविगेशन निर्णय लेना आवश्यक है: वास्तव में वास्तविक कैसे विमान को दिए गए प्रक्षेपवक्र से बाहर निकलने के लिए उड़ान पथ को बदला जाना चाहिए। यह नेविगेशन समाधान, उदाहरण के लिए, लक्ष्य शीर्षक, रोल या लंबवत गति मानों का रूप ले सकता है जो नेविगेटर पायलट को संचार करता है। पायलट उन्हें लागू करता है (उदाहरण के लिए,
विमान को किसी दिए गए पाठ्यक्रम पर घुमाता है) और विमान, अपने वास्तविक प्रक्षेपवक्र को बदलते हुए, दिए गए के करीब लाता है। और क्रियाओं का यह क्रम समय-समय पर पूरी उड़ान में दोहराया जाता है।
विमान पर, जिस पर हवाई नेविगेशन प्रक्रिया एक डिग्री या किसी अन्य के लिए स्वचालित होती है, विमान स्थान, और यहां तक कि किसी दिए गए प्रक्षेपवक्र के लिए आउटपुट भी स्वचालित रूप से किया जा सकता है। नाविक (या पायलट, चालक दल में एक नाविक की अनुपस्थिति में) नेविगेशन समाधान जहाज पर उपकरण का चयनित स्वचालित संचालन मोड है। संचालन के कई तरीके हो सकते हैं, उदाहरण के लिए, विमान की गति के निर्देशांक और मापदंडों को निर्धारित करने के लिए किस प्रकार के तकनीकी साधनों का उपयोग किया जाता है।
नेविगेशन की तकनीकी सहायता... विमान की उड़ानें रात में और बादलों के ऊपर की जाती हैं, जब जमीन दिखाई नहीं देती है, और दृश्य अभिविन्यास करना असंभव है। इसलिए, विमान के स्थान का निर्धारण और
ऐसा लगता है कि सबसे तेज़ और सबसे सुविधाजनक तरीका दो हवाई अड्डों के बीच एक सीधी रेखा में उड़ान भरना है। हालांकि, वास्तव में, केवल पक्षी सबसे छोटे रास्ते पर उड़ते हैं, और हवाई जहाज - वायुमार्ग के साथ। वायुमार्ग में मार्ग बिंदुओं के बीच खंड होते हैं, और मार्ग बिंदु स्वयं सशर्त होते हैं भौगोलिक निर्देशांक, जो, एक नियम के रूप में, एक शब्द के समान पांच अक्षरों का एक निश्चित आसानी से याद रखने योग्य नाम है (आमतौर पर लैटिन में, लेकिन रूसी में लिप्यंतरण का उपयोग किया जाता है)। आमतौर पर इस "शब्द" का कोई मतलब नहीं होता है, उदाहरण के लिए, नोला या लूनोक, लेकिन कभी-कभी पास के किसी का नाम समझौताया कुछ भौगोलिक स्थल, उदाहरण के लिए, OLOBA बिंदु Olonets शहर के पास स्थित है, और NURMA नूरमा गाँव के आसपास है।
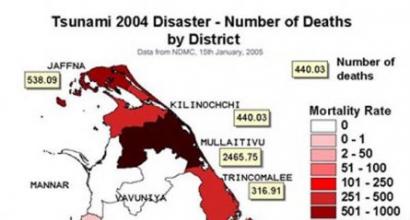
हवाई मार्ग का नक्शा
मार्ग हवाई यातायात को सुव्यवस्थित करने के लिए बिंदुओं के बीच के खंडों से बनाया गया है: यदि हर कोई यादृच्छिक रूप से उड़ान भरता है, तो यह डिस्पैचर्स के काम को बहुत जटिल कर देगा, क्योंकि यह भविष्यवाणी करना बहुत मुश्किल होगा कि प्रत्येक उड़ान विमान कहाँ और कब होगा। और यहाँ हर समय - और एक के बाद एक उड़ते रहो। आरामदायक! नियंत्रक यह सुनिश्चित करते हैं कि विमान एक दूसरे से 5 किलोमीटर से अधिक की दूरी पर नहीं उड़ते हैं, और यदि कोई किसी को पकड़ लेता है, तो उन्हें थोड़ा धीमा (या दूसरा - थोड़ा तेज) उड़ान भरने के लिए कहा जा सकता है।
चाप का रहस्य क्या है?
फिर, वे एक चाप में क्यों उड़ते हैं? यह वास्तव में एक भ्रम है। मार्ग, यहां तक कि राजमार्गों के साथ, एक सीधी रेखा के काफी करीब है, और आप केवल समतल मानचित्र पर एक चाप देखते हैं, क्योंकि पृथ्वी गोल है। इसे सुनिश्चित करने का सबसे आसान तरीका एक ग्लोब लेना है और दो शहरों के बीच एक तार को सीधे उसकी सतह पर खींचना है। याद रखें कि यह कहाँ स्थित है, और अब एक समतल मानचित्र पर इसके मार्ग को दोहराने का प्रयास करें।
मास्को से लॉस एंजिल्स के लिए उड़ान मार्ग केवल एक चाप लगता है
हालांकि, अंतरमहाद्वीपीय उड़ानों के संबंध में एक और बारीकियां हैं। चार इंजन वाले विमान (Boieng-747, Airbus A340, A380) एक सीधी रेखा में उड़ सकते हैं। लेकिन अधिक किफायती ट्विन-इंजन (Boeing-767, 777, Airbus A330, आदि) को ETOPS (एक्सटेंडेड रेंज ट्विन इंजन ऑपरेशनल परफॉर्मेंस स्टैंडर्ड्स) सर्टिफिकेशन के कारण चक्कर लगाना पड़ता है। उन्हें निकटतम वैकल्पिक हवाई क्षेत्र (एक नियम के रूप में, 180 मिनट, लेकिन कभी-कभी अधिक - 240 या यहां तक कि 350) के लिए एक निश्चित उड़ान समय से अधिक की दूरी पर नहीं रहना चाहिए, और एक इंजन की विफलता के मामले में, तुरंत वहां जाएं एक आपातकालीन लैंडिंग। यह वास्तव में एक चाप में उड़ता हुआ निकला।
मार्ग के "थ्रूपुट" को बढ़ाने के लिए, पृथक्करण का उपयोग किया जाता है, अर्थात विमानों को ऊंचाई में अलग किया जाता है। विशिष्ट उड़ान ऊंचाई को उड़ान स्तर कहा जाता है, या, अंग्रेजी में, उड़ान स्तर - "उड़ान स्तर"। ट्रेनों को स्वयं FL330, FL260, आदि कहा जाता है, संख्या सैकड़ों फीट में ऊंचाई को इंगित करती है। यानी FL330 10,058 मीटर की ऊंचाई पर है। कुछ समय पहले तक, रूस ने मीट्रिक प्रणाली का उपयोग किया था, इसलिए पायलट अभी भी आदत से बाहर कहते हैं: "हमारी उड़ान दस हजार मीटर की ऊंचाई पर होगी," लेकिन अब वे अंतरराष्ट्रीय पैर प्रणाली में भी बदल गए हैं।
नेविगेशन प्रदर्शन
वे ऊंचाई कैसे प्राप्त करते हैं?
पूर्व से पश्चिम की ओर उड़ानों के लिए "सम" (300, 320, 340, आदि) का उपयोग किया जाता है, विषम - पश्चिम से पूर्व की ओर। कुछ देशों में, क्षेत्रों को चार प्रमुख बिंदुओं के बीच विभाजित किया जाता है। बात सरल है: इसके लिए धन्यवाद, एक दूसरे की ओर उड़ने वाले विमानों के बीच हमेशा कम से कम 1000 फीट की ऊंचाई होगी, यानी 300 मीटर से अधिक।
लेकिन पूर्व से पश्चिम और पश्चिम से पूर्व की ओर उड़ान के समय के अंतर का सोपानों से कोई लेना-देना नहीं है। और पृथ्वी के घूमने तक भी, क्योंकि वायुमंडल ग्रह के साथ घूमता है। यह सरल है: उत्तरी गोलार्ध में, हवाएँ पश्चिम से पूर्व की ओर अधिक बार चलती हैं, इसलिए एक मामले में हवा की गति को हवा के सापेक्ष हवाई जहाज की गति में जोड़ा जाता है (यह सशर्त रूप से स्थिर है), और दूसरे में इसे घटाया जाता है , इसलिए जमीन के सापेक्ष गति अलग है। और सोपान पर हवा 100, 150 और 200 किमी / घंटा की गति से भी चल सकती है।
सोपानों पर वायुयान की गति की दिशा
नेविगेशन कैसे काम करता है?
हाल ही में, पायलट सूर्य, चंद्रमा और सितारों सहित नेविगेट करने में सक्षम थे, और पुराने विमानों पर इसके लिए कॉकपिट के ऊपरी हिस्से में खिड़कियां भी थीं। प्रक्रिया बल्कि जटिल थी, इसलिए चालक दल में एक नाविक भी मौजूद था।
हवाई नेविगेशन में, ग्राउंड बीकन का उपयोग किया जाता है - रेडियो स्टेशन जो एक ज्ञात बिंदु से एक ज्ञात आवृत्ति पर हवा पर एक संकेत भेजते हैं। नक्शे पर बारंबारता और बिंदु अंकित हैं। वांछित आवृत्ति के लिए एक विशेष "गोलाकार" एंटीना के साथ एयरबोर्न रिसीवर को ट्यून करके, आप समझ सकते हैं कि रेडियो बीकन किस दिशा में स्थित है।
यदि बीकन सबसे सरल, गैर-दिशात्मक बीकन (एनडीबी, गैर-दिशात्मक बीकन) है, तो और कुछ भी नहीं सीखा जा सकता है, लेकिन ज्ञात गति से इस बीकन की दिशा बदलकर, आप अपने निर्देशांक की गणना कर सकते हैं। एक अधिक उन्नत अज़ीमुथ बीकन (वीओआर, वीएचएफ ओमनी-डायरेक्शनल रेडियो रेंज) में सर्कुलर एंटेना भी होते हैं और इसलिए इसका उपयोग चुंबकीय असर को निर्धारित करने के लिए किया जा सकता है, यानी यह समझने के लिए कि आप इस बीकन के सापेक्ष किस दिशा में आगे बढ़ रहे हैं। एक रेंजफाइंडर बीकन (डीएमई, दूरी मापने के उपकरण, डोमोडेडोवो हवाई अड्डे के साथ भ्रमित नहीं होना चाहिए), जो एक रडार के सिद्धांत पर काम करता है, आपको इसकी दूरी निर्धारित करने की अनुमति देता है। एक नियम के रूप में, अज़ीमुथ और रेंजफाइंडर बीकन (VOR / DME) जोड़े में स्थापित होते हैं।
फ्लाइट रडार 24 ऐप में लंदन और उसके आसपास कुछ ऐसा दिखता है।